
Uno de los grandes retos de la robótica no es solo lograr que una máquina vea el mundo, sino que pueda recordarlo de forma útil.
Para un humano, recordar dónde dejamos una herramienta, una mochila o unas llaves puede parecer algo cotidiano. Pero para un robot, esa tarea implica mucho más que tomar una imagen: necesita entender qué vio, dónde estaba, cuándo lo vio y cómo recuperar esa información después cuando alguien se lo pregunte.
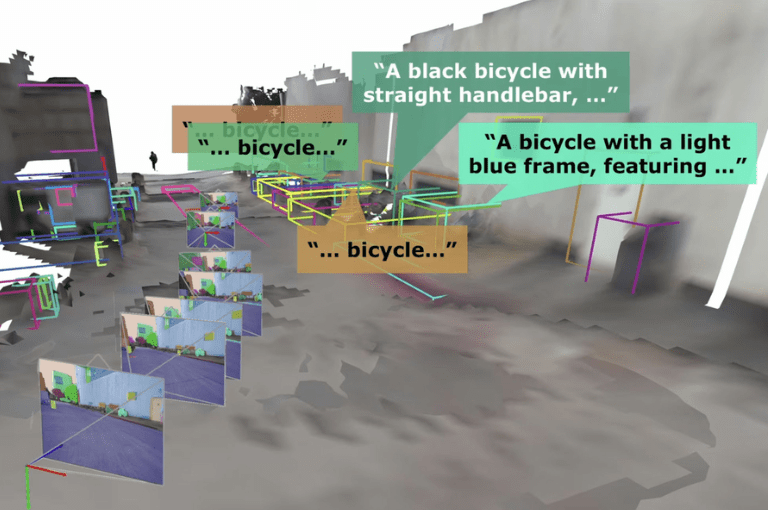
Investigadores del MIT desarrollaron un nuevo sistema de memoria para robots llamado DAAAM, abreviatura de Describe Anything, Anywhere, Anytime, at Any Moment. La idea es permitir que los robots construyan una especie de “memoria espacial” de largo plazo mientras recorren un entorno.
A diferencia de un mapa tradicional, que solo puede mostrar paredes, rutas o coordenadas, este sistema combina mapas 3D con descripciones detalladas de los objetos que el robot observa. Por ejemplo, no solo registra que hay una bicicleta en cierto lugar, sino que puede guardar detalles como su color, su ubicación, si tiene una llanta ponchada o si está cerca de un edificio específico.
Esto es importante porque permite que el robot responda preguntas en lenguaje natural. En lugar de programarlo con comandos rígidos, una persona podría preguntarle algo como: “¿Dónde viste la bicicleta roja?” o “¿Dónde dejé mi cartera?”. El sistema buscaría en su memoria espacial y recuperaría la información relacionada con objetos, lugares y momentos.
Para lograrlo, DAAAM une dos áreas clave: visión computacional y mapeo robótico. Los modelos de visión pueden describir objetos con mucho detalle, mientras que los sistemas de mapeo ayudan a ubicar esos objetos dentro de un espacio físico. La aportación del MIT está en combinar ambas cosas de forma eficiente para que el robot pueda procesar entornos grandes sin volverse demasiado lento.
Uno de los puntos más interesantes es que el sistema no intenta describir cada imagen de manera aislada. En cambio, agrupa objetos cercanos y selecciona las mejores vistas para analizarlas. Esto reduce el trabajo computacional y permite que el robot construya su memoria en tiempo real mientras se mueve.
Los investigadores reportan que DAAAM fue más preciso que otros métodos en tareas de preguntas espaciales y temporales. Esto significa que el robot no solo puede ubicar objetos, sino también razonar mejor sobre relaciones entre lugares, objetos y momentos.
Las posibles aplicaciones van más allá de encontrar llaves. Este tipo de memoria podría ayudar a robots industriales a localizar piezas en una fábrica, asistir a trabajadores de mantenimiento, apoyar sistemas de realidad aumentada o permitir que robots de servicio interactúen de forma más natural con las personas.
Aun así, todavía no estamos hablando de un robot doméstico perfecto que recuerde todo lo que pasa en una casa. Este es un avance de investigación, no un producto comercial terminado. El sistema todavía depende de la calidad de sus sensores, de los modelos de visión y lenguaje, y de su capacidad para evitar errores al interpretar el entorno.
Pero el avance apunta hacia una dirección muy clara: robots que no solo se muevan por el mundo, sino que puedan construir recuerdos útiles sobre él.
En pocas palabras, MIT está acercando a los robots a una habilidad muy humana: recordar dónde están las cosas y entender el espacio como algo más que simples coordenadas.











